Piloter le système réel

Attendues de fin de cycle et les compétences travaillées
Exprimer sa pensée à l'aide d'outils de description adaptés | |
|---|---|
Exprimer sa pensée à l'aide d'outils de description adaptés : croquis, schémas, graphes, diagrammes, tableaux. | x |
Écrire, mettre au point et exécuter un programme | |
Analyser le comportement attendu d'un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande. | x |
Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu. | x |
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : |
|---|---|---|---|
1 Tracker solaire Servomoteur rotation : Branché en D6 Servomoteur inclinaison : Branché en D5 | Piloter le tracker à l'aide des touches du clavier. | ||
| Informatique : |
| Situation déclenchante : |
- | Comment incliner le traqueur ? | ||
| Organisation du groupe : |
| Reformulation : |
|






PARTIE 1 - Piloter un servomoteur à l'aide du clavier
Fondamental : Le cahier des charges

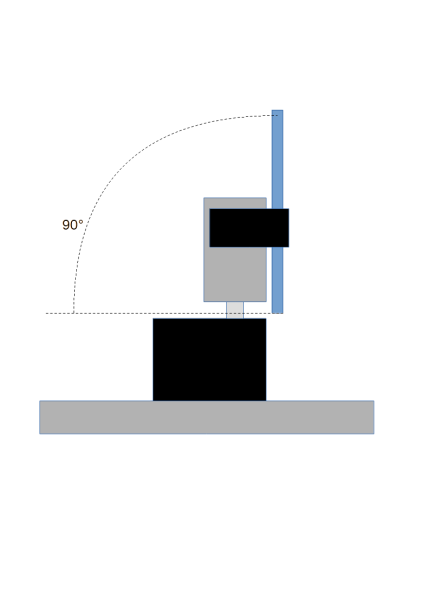
Nous voulons créer un programme qui doit permettre au robot de : positionner son servomoteur à 90° ;
|
Piloter le système avec mBlock
Méthode : Travail à Faire - Programmation mBlock

Tâches |
| |
|---|---|---|
1 - Décrire le comportement du système si pas fait à la séance précédente | ||
1 | Ouvrir le fichier et le compléter | |
1.2 | Compléter le diagramme d'activité[1] que décrit l'algorithme Nous voulons créer un programme qui doit permettre au robot de : positionner son servomoteur à 90° ;
|
|
1.3 | Imprimer votre travail sur l'imprimante MPC 300 Techno | |
2 - Pilotage mBlock - Connexion | ||
2.1 | Ouvrir le logiciel mblock | |
2.2 | Se connecter à la carte Arduino en suivant la méthode ci-contre |
|
3 - Programmation | ||
3.1 | Télécharger et ouvrir le fichier | |
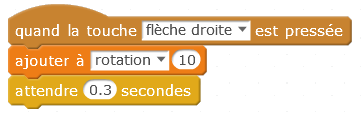
3.2 | Compléter le programme afin d'ajouter les flèches gauche - haut -bas. Pour rappel :
Inspirez vous du bloc : | instructions conditionnelles |
4 - Étalonnage du servomoteur | ||
4.1 | La variable inclinaison permet d'indiquer l'angle d'inclinaison du traqueur. Cette variable a une valeur comprise entre 0 et 255 qui ne correspond pas au véritable angle du traqueur.
| |
4.2 | Tester votre programme en cliquant sur le drapeau vert | |
4.3 | Enregistrer votre travail dans perso | |