Piloter avec un joystick

Attendues de fin de cycle et les compétences travaillées
Exprimer sa pensée à l'aide d'outils de description adaptés | |
|---|---|
Exprimer sa pensée à l'aide d'outils de description adaptés : croquis, schémas, graphes, diagrammes, tableaux. | x |
Écrire, mettre au point et exécuter un programme | |
Analyser le comportement attendu d'un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande. | x |
Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu. | x |
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : |
|---|---|---|---|
1 Tracker solaire Servomoteur rotation : Branché en D6 Servomoteur inclinaison : Branché en D5 | Piloter le tracker à l'aide des touches du clavier. | ||
| Informatique : |
| Situation déclenchante : |
- | Comment incliner le tracker ? | ||
| Organisation du groupe : |
| Reformulation : |
|






Activité
Fondamental : Matériel
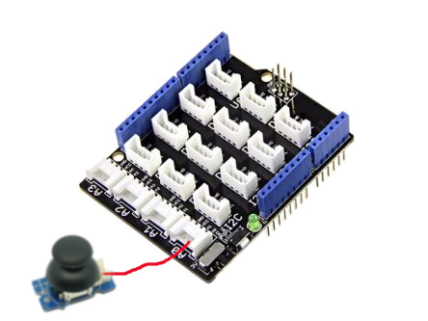
Le Joystick est connecté sur la broche A0 du shield Grove
Méthode : Travail à Faire

1 | Ouvrir le fichier mBlock | |
|---|---|---|
2 | Câbler le système en respectant le numéro des broches indiqué dans la partie matériel. | |
2.2 | Se connecter à la carte Arduino |
|
2 | Brancher un joystick | |
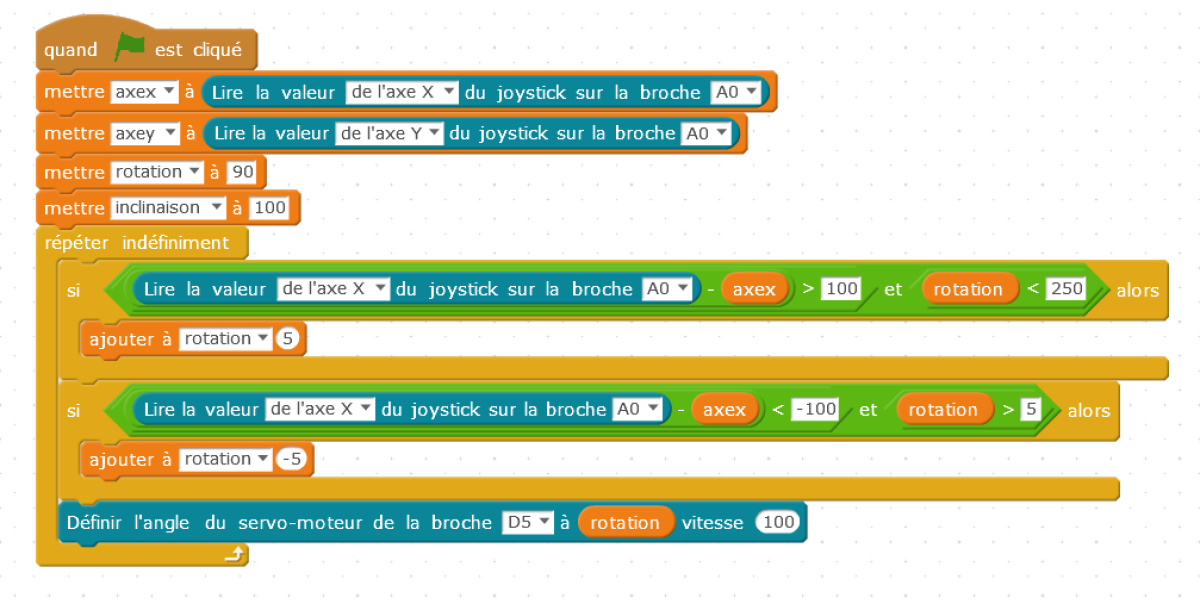
3 | Ce programme permet uniquement de piloter la rotation du tracker.
Compléter le afin de piloter l'inclinaison. Utiliser les variables :
Le servomoteur d'inclinaison est branché en D5 |

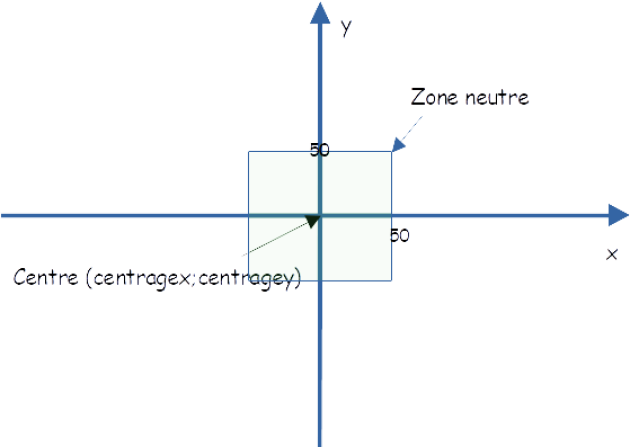
Complément : Explication du centrage d'un joystick