Simulation TinkerCad

1 - Problématique
Attendues de fin de cycle et les compétences travaillées
Utiliser une modélisation et simuler le comportement d'un objet | |
|---|---|
Utiliser une modélisation pour comprendre, formaliser, partager, construire, investiguer, prouver. | x |
Simuler numériquement la structure et/ou le comportement d'un objet. Interpréter le comportement de l'objet technique et le communiquer en argumentant. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : |
|---|---|---|---|
- - | Simuler le fonctionnement du traqueur à l'aide de Tinkercad | ||
| Informatique : |
| Situation déclenchante : |
- - | |||
| Organisation du groupe : |
| Reformulation : |
|






2 - Activité
Fondamental : Le cahier des charges

Nous voulons créer un programme qui doit permettre au robot de : positionner son servomoteur à 0° ;
|
Méthode : Travail à Faire

Tâches |
| |
|---|---|---|
1 | Ouvrir le fichier et le compléter | |
1.2 | Compléter le diagramme d'activité[1] que décrit l'algorithme Nous voulons créer un programme qui doit permettre au robot de : positionner son servomoteur à 90° ;
|
|
1.3 | Imprimer votre travail sur l'imprimante MPC 300 Techno | |
2 - Se connecter à Tinkercad | ||
2.1 | - Cliquer sur votre classe | |
2.2 | - | Votre pseudo est constitué de "nomprénom"
Exemple pour Dupont-Durand Léa le pseudo est : dupontléa |
3 - Compléter le projet | ||
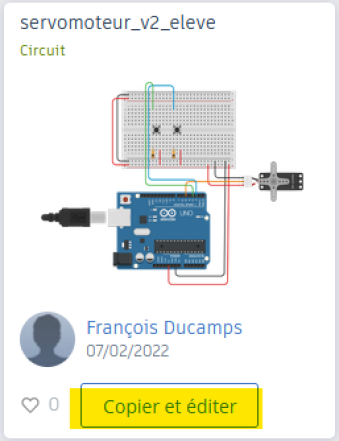
3.1- Ouvrir le projet | - Cliquer sur | |
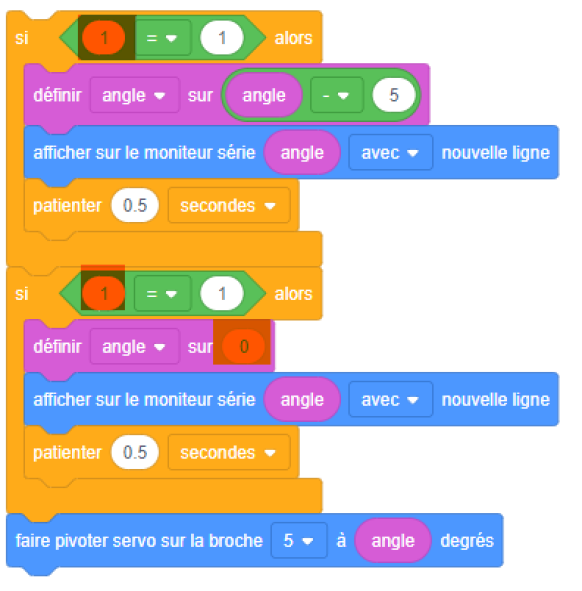
3.2 - Compléter les blocs | - Cliquer en haut à droite sur - Corriger certains blocs qui contiennent des erreurs (soulignées en orange) | Blocs à utiliser :
Le bouton droit est branché sur la broche numérique 2 ; Si clique sur bouton droit = Le bouton gauche est branché sur la broche numérique 3 ; Si clique sur le bouton gauche = |
3.3 - Lancer la simulation | - Cliquer sur Afficher le moniteur série en bas à droite de l'éditeur de code - Cliquer sur Démarrer la simulation : - Appuyer sur les boutons |
|
4 - Valeur max et mini de rotation | ||
4.1 Recherche des angles max du servomoteur | - Regarder bouger le servomoteur lorsque vous appuyez sur les boutons et regarder la valeur de l'angle. Regarder la valeur de la variable angle dans le moniteur série. - Rechercher les valeurs mini à maxi à partir desquelles le servomoteur ne bouge plus. |
|
4.2 | - Modifier votre programme afin que la valeur de la variable angle soit comprise entre la valeur mini et la valeur maxi de rotation du servomoteur.
|
|