1 - Mouvement rectiligne
I - Problématique
Attendues de fin de cycle et les compétences travaillées
Observer et décrire différents types de mouvements. | |
|---|---|
Mouvement d'un objet (trajectoire et vitesse : unités et ordres de grandeur). | x |
Mouvements dont la valeur de la vitesse est constante ou variable (accélération, décélération) dans un mouvement rectiligne. | x |
Repérer et comprendre la communication et la gestion de l'information | |
Le stockage des données, notions d'algorithmes, les objets programmables. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : Découvrir la notion d'algorithme et de mouvement rectiligne. Modifier la vitesse d'un système. |
|---|---|---|---|
| Informatique :
|
| Situation déclenchante : Vous allez devoir simuler le déplacement du robot curiosity sur le sol de Mars. |
| Organisation du groupe :
|
| Reformulation : |







4 - Activité
Méthode : 4.1 - Aller à un endroit précis

3 | Ce fichier contient un robot posé sur Mars | |
|---|---|---|
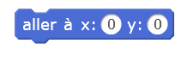
4 | Modifier les valeurs du bloc Indiquez ci-dessous la position du robot pour les valeurs suivantes : (x=0 y=0) ; (x=100 y=0) ; (x=-100 y=0) ; (x=0 y=-100) ; (x=0 y=-100) |
Méthode : 4.2 - Faire avancer le robot de 20 pas
6 | Créer un programme afin de faire avancer votre robot de 20 pas en ligne droite. (mouvement rectiligne)
| |
|---|---|---|
7 | M'appeler quand vous avez terminé ce travail | |
8 | Faire une copie d'écran de votre programme et la coller dans votre compte rendu. |


Méthode : 4.3 - Faire avancer le robot pendant 1 seconde
2 | Modifier le programme afin de faire avancer le robot pendant 1 seconde. Coller dans le document élève une copie de votre écran. | |
|---|---|---|
3 | L'algorithme du programme de base est :
Rédiger l'algorithme de votre programme modifié. | |
4 | Modifier votre programme afin que le robot se déplace deux fois moins vite. Coller dans le document élève une copie de votre écran. | |
5 | Écrire le nouvel algorithme de votre programme |